Супутникова навігація : основні принципи роботи. Проблеми та методи їх вирішення
Супутникова навігація : основні принципи роботи.
Приcтрої супутникової навігації тісно ввійшли в наше життя. Моніторинг транспортних засобів, навігація морських суден та літаків, персональна навігація — неповний перелік сфер, в яких використовується супутникова навігація. Але далеко не кожен розуміє принцип роботи супутникової навігації, знає її різновиди та складові. То ж розглянемо детальніше:
Супутникова система навігації (GNSS — Global Navigation Satellite System) — система наземного та космічного обладнання, що призначена для позиціонування в просторі та часі, а також для визначення швидкості, напрямку та інших параметрів руху об’єкта.

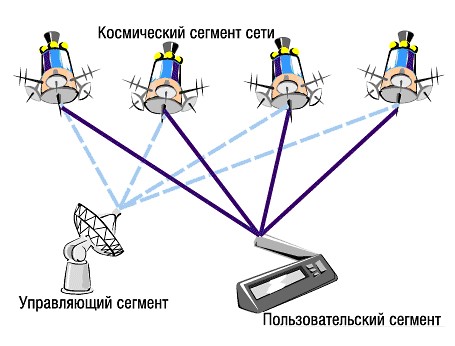
Загальні елементи супутникової системи навігації:
• Орбітальна група -
Система космічних апаратів у вигляді мережі навігаційних супутників
• Наземна система керування та контролю -
Блоки вимірювання положення супутників та передачі на них отриманої інформації для корегування інформації про орбіти
• Приймальне обладнання
"супутникові навігатори", що використовуються для визначення місцезнаходження
• Опціонально-інформаційна радіосистема для передачі користувачам поправок, що дозволяє значно підвищити точність визначення координат.
Принцип дії супутникових систем навігації заснований на вимірюванні відстані від антени приймача на об'єкті до навігаційних супутників, місцезнаходження яких відоме з великою точністю. Таблиця положень супутників («альманах») є в кожному приймачі супутникового сигналу до початку вимірювань. Зазвичай приймач зберігає альманах у пам'яті з часу останнього ввімкнення. Кожний супутник передає в своєму сигналі весь альманах. Таким чином, знаючи відстані до декількох супутників системи, за допомогою звичайних геометричних побудов на основі альманаху вираховується положення об'єкта в просторі.
Метод вимірювання відстані від супутника до антени приймача заснований на визначенні швидкості поширення радіохвиль. Для реалізації можливості вимірювання часу поширюваного радіосигналу кожен супутник навігаційної системи випромінює сигнали точного часу, використовуючи синхронізований з системним часом атомний годинник. При роботі супутникового приймача його годинник синхронізується з системним часом, і при подальшому прийомі сигналів супутників обчислюється затримка між часом випромінювання, шо міститься в самому сигналі, і часом прийому сигналу антеною приймача. Маючи дану інформацію, навігаційний приймач вираховує координати антени. Решта параметрів руху (швидкість, напрямок, пройдена відстань) обчислюється на основі вимірювання часу, який об'єкт витратив на переміщення між двома або більше точками з координатами, визначеними за попередніми обчисленнями.
Найвідоміші на сьогодні системи супутникової навігації:
• GPS
• ГЛОНАСС
• Galileо
• Бейдоу

Всі вони працюють за схожим принципом: для середнього за точністю позиціонування в просторі антена приймача має отримувати сигнал мінімум від 4 супутників системи (або від 3, якщо 1 з координат відома, наприклад, висота над рівнем моря судна в океані – 0 м), але є певні відмінності. Наприклад, кожна супутникова навігаційна система визначає місцезнаходження в «своїй» системі координат, кожна з систем супутникової навігації належить різним країнам чи угрупуванням країн. Але ці чинники не є важливими для користувачів, набагато важливішими відмінностями є нахил та кількість орбіт, на яких знаходяться супутники, а також їх кількість, період обертання навколо Землі, оскільки саме ці параметри найбільше впливають на точність позиціонування.

ГЛОНАСС
ГЛОНАСС (Глобальна Навігаційна Супутникова Система) - російська радіонавігаційна супутникова система, розроблена на замовлення Міністерства оборони СРСР.
Основою системи є 24 активні супутники, що обертаються на орбіті середньою висотою 19 100 км над поверхнею Землі з нахилом 64,8° та періодом близько 11 годин в трьох орбітальних площинах із 8 рівномірно розподіленими супутниками в кожній, а також резервні апарати, призначення яких – в будь-який момент часу замінити супутники, що за певних причин вийшли з ладу. Значення періоду дозволило створити стійку орбітальну систему, що не потребує для своєї підтримки корегувальних імпульсів. Сигнали передаються з направленістю в 38° з використанням правої кругової поляризації, із потужністю 316—500 Вт (EIRP 25-27 dBW). Супутники системи ГЛОНАСС стало передають радіовипромінювання двох типів: навігаційний сигнал діапазону L1 (1,6 ГГц) та навігаційний сигнал високої точності діапазонів L2 и L3 (1,2 ГГц). Наземний комплекс керування ГЛОНАСС складається з центру керування системою та контрольних станцій. Орбіта супутників ГЛОНАСС надає можливість застосування навігаційної системи на високих широтах (північний і південний полярний регіон), де сигнал GPS приймається погано.
На сьогоднішній день похибки навігаційних показників ГЛОНАСС по довготі і широті становлять 3—6 м при використанні в середньому 7—8 супутників (залежно від точки прийому сигналів). Після запланованого раніше виведення на орбіту апаратів для корегування сигналу очікується підвищення точності позиціонування до 1 м.
ГАЛІЛЕО
Галілео – система супутникової навігації Європейського Союзу та Європейського космічного агентства.
Система почала діяти з 15 грудня 2016 року в обмеженому режимі. Повністю розгорнута система складатиметься з 27 активних та 3 запасних супутників, що обертатимуться з висотою 23 222 км над поверхнею Землі з нахилом 56° та періодом близько 14 годин в трьох орбітальних площинах із 9 активними та 1 резервним супутником в кожній. Наземна інфраструктура включає два (в майбутньому – 3) центри управління й глобальну мережу передавальних і приймальних станцій. Після завершення проекту, яке заплановано на 2020 рік, навігаційні сигнали Галілео забезпечать хороше покриття навіть на широтах до 75° північної широти, а точність визначення місцезнаходження об’єкта сягатиме 1 м.
Також у майбутньому стане доступною додаткова функція - супутники Галілео передаватимуть сигнали тривоги від користувачів до регіональних рятувально-координаційних центрів. У відповідь система надсилатиме сигнал користувачам, повідомляючи, що аварійну ситуацію виявлено, що вважається значним оновленням у порівнянні з наявною системою, яка не забезпечує зворотного зв'язку.
Бейдоу
Бейдоу - китайська супутникова система навігації. Планується, що космічний сегмент навігаційної супутникової системи Бейдоу буде складатися з орбітального угруповання змішаного типу, що складатиметься з супутників на орбітах 3 типів.
Система Бейдоу почала функціонувати ще в 2003 році, була запущена в комерційну експлуатацію 27 грудня 2012 як регіональна система позиціонування (лише для азіатсько-тихоокеанського регіону), при цьому супутникове угруповання становило 16 супутників. На сьогодні межі надання послуг позиціонування системою Бейдоу продовжують розширятись. Точність позиціонування системи для цивільного населення становить менше 10 метрів, точність вимірювання швидкості менше 0,2 метра в секунду. Планується, що до 2020 року орбітальне угруповання Бейдоу буде складатися з 35 космічних апаратів, з яких 5 Beidou-G перебуватимуть на геостаціонарній орбіті (точки 58,75 ° сх.д., 80 ° сх.д., 110,5 ° сх.д., 140 ° сх.д. і 160 ° сх.д.), 27 Beidou-M - на середній круговій орбіті (висота 21 500 км, період обертання 12 год 53 хв, нахил 55 °) і 3 Beidou-IGSO - на геосинхронних похилих високих орбітах (в трьох площинах, висотою орбіти 35 786 км, нахилом 55 °), підсупутникові точки яких рухаються на поверхні Землі по одній «трасі» у формі вісімки, вісь симетрії якої знаходиться на довготі 118° східної довготи. Це забезпечить перехід системи Бейдоу від статусу регіональної до глобальної системи супутникової навігації.
GPS (NAVSTAR)
NAVSTAR GPS (Global Positioning System Navigation Satellite Time and Ranging) — високоточна супутникова система навігації , яка дозволяє визначити місцезнаходження об'єкта, його широту, довготу та висоту над рівнем моря, а також напрямок і швидкість його руху. Комплекс NAVSTAR розроблений, утілений і належить Міністерству оборони США.
Станом на сьогодні основою системи є 32 супутники (активні та резервні), що працюють у єдиній мережі й обертаються на шести кругових орбітах, розташованих під кутом 60° одна до одної. На кожній орбіті розміщено по 4 активні супутники, висота орбіт приблизно дорівнює 20 200 км, нахил орбіти - 55°, а період обертання кожного супутника навколо землі дорівнює 12 годинам. Таким чином, із будь-якої точки земної поверхні зазвичай одночасно видно від чотирьох до дванадцяти таких супутників. Кожні 30 секунд супутник передає навігаційні повідомлення, в яких містяться дані про положення супутника в певний момент часу, дані про якість сигналу, похибку супутникового годинника та коефіцієнти моделі іоносфери. Передача сигналу з супутника відбувається на частоті 1575,42 МГц.
Станції керування розміщені в Колорадо-Спрінгз, Дієго-Гарсія, на острові Вознесіння, атолі Кваджелейн і на Гаваях. Вся інформація, що проходить через ці станції, записується ними та передається на головну станцію на авіабазі в Шрівері (штат Колорадо).
Звичайна точність сучасних GPS-приймачів в горизонтальній площині становить 5-10 метрів, та 10-20 метрів за висотою. На території США і Канади є станції WAAS, в Європі діють станції EGNOS, які передають поправки для диференційного режиму, що дозволяє збільшити точність обчислення положення до 1-2 метрів. При використанні більш складного додаткового обладнання точність визначення координат можна довести до 10 см. Проте, невисокий нахил орбіт супутників GPS (приблизно 55°) значно погіршує точність у приполярних регіонах Землі, оскільки супутники GPS невисоко піднімаються над горизонтом.
Проблеми систем супутникової навігації
Недоліком усіх систем супутникової навігації є те, що за певних умов сигнал від супутників може надходити до приймача з затримкою або не надходити взагалі. Оскільки робоча частота GPS лежить у дециметровому діапазоні радіохвиль, рівень прийому сигналу супутників приймачем може значно погіршитись під щільним листям дерев, через велику хмарність. Нормальному прийому сигналів GPS можуть завадити перешкоди від багатьох наземних радіоджерел, а також від магнітних бур. Перешкодами для проходження сигналу також можуть бути: щільна забудова міста (велика кількість хмарочосів), товсті бетонні чи залізобетонні стіни, розміщення приймача у підземному приміщенні. Щоб мінімізувати цей недолік системи супутникової навігації, рекомендовано розміщувати приймач на максимально відкритій місцевості, або, якщо це неможливо, використовувати виносні антени для покращення передачі сигналів.
Перед вибором пристроїв супутникової навігації варто з’ясувати, які системи супутникової навігації краще функціонують у Вашій місцевості. Наприклад, у полярних регіонах GPS(NAVSTAR) має малу точність, порівняно з ГЛОНАСС (причиною є різний нахил орбіт супутників), хоча загалом GPS забезпечує більш точне визначення місцезнаходження.
Також проблемою GPS (та деяких інших систем супутникової навігації) вважається скидання номеру тижня (WNRO - week number roll over), адже це може повпливати на роботу пристроїв супутникової навігації. У складі навігаційних радіосигналів, що передаються з супутників системи до приймача, міститься номер тижня, максимальне значення якого – 1023. Коли номер тижня досягає значення 1023, лічильник скидає відлік номеру тижня до 0 (приблизно кожні 20 років). Не підготовані до даної події пристрої можуть почати неправильно вираховувати час та дату, що може повпливати на функції пристрою, які залежать від даних параметрів. Для мінімізування впливу WNRO на Ваші пристрої супутникової навігації, необхідно вчасно оновлювати ПЗ та, при виникненні питань, звертатися до виробника. Хороша новина полягає в тому, що з модернізацією GPS (та інших ССН) максимальне значення номеру тижня збільшиться (спеціалісти GPS хочуть збільшити кількість біт лічильника), і про WNRO можна буде не турбуватись значно довше.
GPS, RTK, A-GPS та LBS
Якщо пристрій, що використовує GPS, перебуває в неактивному стані протягом тривалого часу (більше кількох годин), виникає проблема зі швидкістю визначення місцезнаходження при переведенні пристрою в активний стан. Це пов’язано з тим, що пристрою необхідний час, щоб визначити, з якими супутниками йому потрібно зв’язатись, отримати від них сигнали та визначити своє місцезнаходження. Тобто, власнику пристрою доведеться очікувати від 45 секунд (якщо пристрій не був активним кілька годин) до майже 15 хв (якщо пристрій не був активним кілька днів) та, можливо, навіть довше.
Для того щоб вплив цього недоліку був мінімальним, виробники, в тому числі і ТМ ОКО використовують технології A-GPS або (та) LBS, а також RTK. Як вони працюють та чим відрізняються?
A-GPS
A-GPS (Assisted GPS) - технологія, яка прискорює «холодний старт» GPS-приймача. Прискорення відбувається завдяки інформації, отриманій через альтернативні канали зв'язку. Коли GPS-приймач перейде із неактивного стану в активний, йому потрібно буде спочатку отримати дані про поточне розташування супутників, а потім вже визначати своє місцезнаходження. Це потребує певних затрат часу. A-GPS допомагає прискорити визначення координат, підключаючись через інтернет до веб-сервера (так званого Assisted-сервера), який вже містить актуальну інформацію про всі супутники. Ця інформація передається через GPRS чи інші типи зв’язку (наприклад, Wi-Fi) на приймач. Таким чином, технологія A-GPS надає пристрою інформацію про розташування потрібних супутників, пришвидшуючи «холодний старт», підвищуючи чутливість приймача та зменшуючи енергоспоживання пристрою.
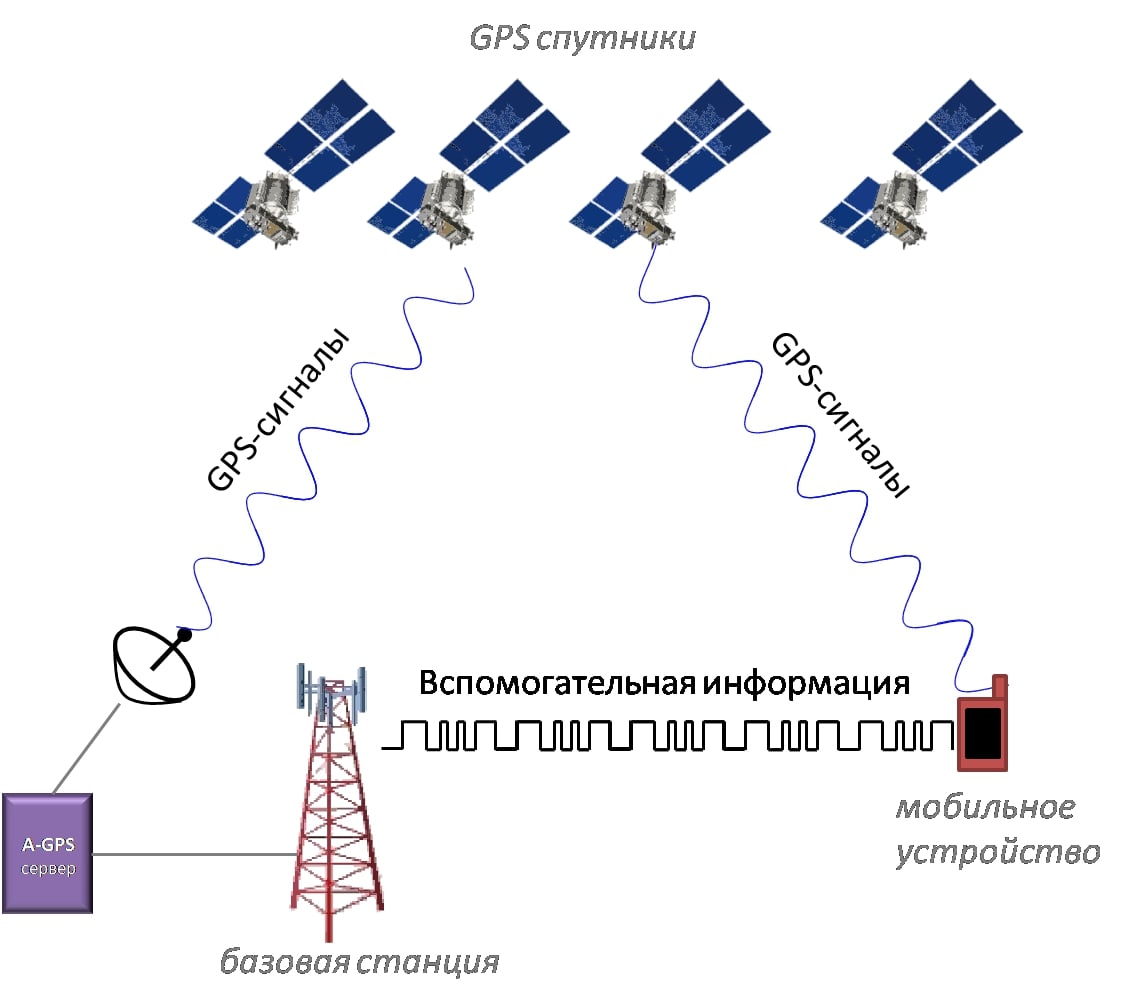
Проте, дана технологія не може функціонувати поза зоною покриття стільникового зв’язку. Крім того, за A-GPS доводиться платити відповідно до встановленого вашим провайдером тарифу, оскільки вона споживає інтернет-трафік (хоч і незначний).
LBS
LBS (Location-based service) – технологія, що надає змогу визначити місцезнаходження об’єкта за електронною картою LBS-системи, на якій зазначене розташування базових станцій операторів стільникового зв’язку. Точність визначення місцезнаходження залежить від щільності розташування базових станцій на заданій місцевості. Міста зазвичай знаходяться в зоні покриття відразу кількох базових станцій, місцезнаходження визначається по точці перетину радіусів покриття кожної із станцій, тому точність визначення місцезнаходження в населених пунктах за допомогою LBS може сягати 50 метрів. За межами населених пунктів, точність визначення може знаходитись в межах від кількох сотень метрів до кількох кілометрів.

Технологія LBS використовує статичну базу даних і дозволяє отримати уявлення про розташування об'єкта, але фактично не може надати точні координати, крім того, не дає ніякої додаткової інформації (наприклад, висота над рівнем моря об’єкта, швидкість переміщення). Однак LBS може надати приблизне місцезнаходження об’єкта тоді, коли GPS не функціонує або функціонує з перебоями (наприклад, у місті з щільним забудовуванням хмарочосами).
RTK
RTK (Real Time Kinematic) - сукупність методів для визначення місцезнаходження в просторі з сантиметровою точністю за допомогою супутникової навігації сумісно з поправками з базових станцій.
Як вже зазначалося вище, за певних умов (хмарність, велика кількість дерев, електро-магнітні перешкоди, тощо) радіосигнали з супутників частково спотворюються, що є причиною погіршення точності позиціонування. Для того, щоб підвищити точність, була винайдена технологія RTK.
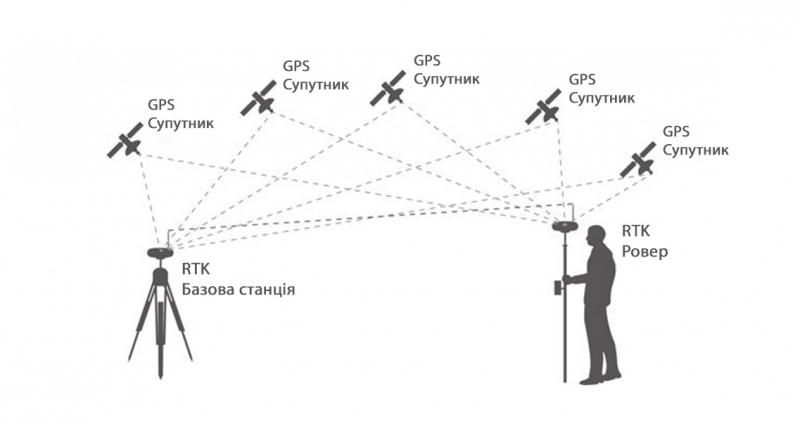
Принцип роботи технології RTK
Для отримання поправок використовується базова станція, координати якої мають бути відомими заздалегідь з великою точністю. Базова станція приймає сигнали від супутників, за допомогою спеціалізованого ПЗ вираховується похибка визначення місцезнаходження станції, формуються поправки. Вони надсилаються на ровер (приймач), який в свою чергу приймає сигнали від тих самих супутників, що й базова станція. Ровер обробляє сигнали супутників та, використовуючи поправки з базової станції, визначає своє місцезнаходження з точністю до 1-2 см в режимі реального часу. Для передачі поправок використовуються радіомодеми, інтернет, тощо.
Також можливе використання мережі базових станцій, що знаходяться на відстані до 70 км одна від одної. В такому випадку кожна базова станція передає отримані з одних і тих же супутників дані про своє місцезнаходження на сервер, який вже формує поправки і надсилає на ровер. Він поєднує дані з сервера та сигнали супутників та вираховує власне місцезнаходження. Таким чином, зникає ризик виникнення неточностей у випадку виходу з ладу однієї зі станцій, зберігається висока точність визначення координат, навіть якщо ровер знаходиться на великій відстані від базової станції.
Для отримання найбільш точних даних, необхідно щоб ровер та базові станції отримували сигнали принаймні з 5 супутників та знаходились на відстані до 30 км одне від одного.
ВИКОРИСТАНІ ДЖЕРЕЛА
1. https://uk.wikipedia.org
2. https://www.glonass-iac.ru
3. https://wireless-e.ru/articles/modules/2006_1_7.php
4. http://www.esa.int/Our_Activities/Navigation/Galileo/What_is_Galileo
5. https://www.topconpositioning.com/ru/gpsrollover
6. http://mirgarmin.com.ua/WNRO.html
7. https://www.dhs.gov/cisa/gps-week-number-roll-over
8. https://trackerplus.ru/gps/a-gps
9. http://www.portativka.com/chto-takoe-a-gps/
10. https://gpsmarker.ru/info/blog/lbs-i-a-gps-v-chem-raznitsa.html
11. http://dalgeokom.ru/media/Seti-bazovyh-stanciy-RTK/